

As slick as soft robots are, they tend to have very simple movements. It’d be a challenge to create a truly complex machine using existing technology. Researchers may have a solution to more sophisticated movement, though. They’ve invented a technique that uses magnetic fields to steer squishier robots. The trick was to cover the robots in a polymer film loaded with iron microparticles made to form parallel chains using a magnetic field. When you want to steer a robot, you just subject its relevant components to another magnetic field — the direction and strength of the field determines what happens.
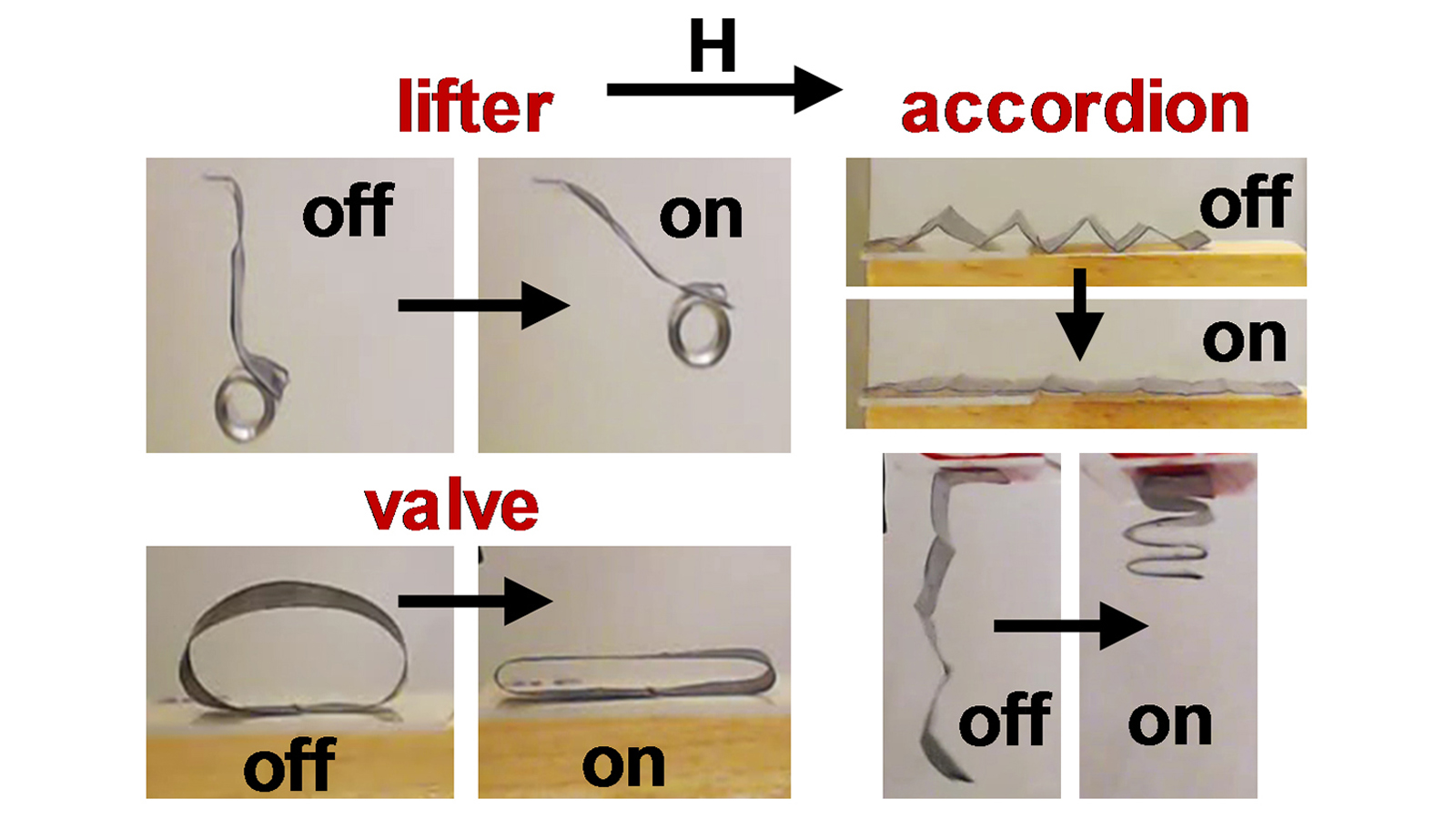
The scientists used their fresh approach to build three robots that take advantage of this newfound flexibility. One is a cantilever (the “lifter” you see above) that can carry up to 50 times its weight. An accordion bot can expand and contract like a muscle, while a valve can squeeze to act as a pump.
There’s no question that it’ll take a long time to make this method viable for real robots. You’d need an external device to produce the field, for a start. However, the potential uses are already easy to see. The accordion and valve robots would be particularly useful for robots that have to mimic organic functions, not to mention prosthetics, implants and other health care equipment.
(118)